Localización de Sistemas Multirobot Cooperativos Mediante Fusión Sensorial por Eventos
Number: 322-B5-A10
 El proyecto desarrolló un algoritmo de fusión para la localización cooperativa de robots móviles pertenecientes a un grupo heterogéneo, que utiliza la información local, global y relativa junto con los principios del control y muestreo basado en eventos y los modelos obtenidos. Se redujo la utilización del canal de comunicación entre robots, los cuales comunican entre sí la información de los sensores relativos y su postura para mejorar la precisión de la localización, a la vez que se redujo la carga computacional requerida por el algoritmo de localización.
El proyecto desarrolló un algoritmo de fusión para la localización cooperativa de robots móviles pertenecientes a un grupo heterogéneo, que utiliza la información local, global y relativa junto con los principios del control y muestreo basado en eventos y los modelos obtenidos. Se redujo la utilización del canal de comunicación entre robots, los cuales comunican entre sí la información de los sensores relativos y su postura para mejorar la precisión de la localización, a la vez que se redujo la carga computacional requerida por el algoritmo de localización.
Objetivos
Los objetivos de este proyecto son:
-
Evaluar los filtros de fusión para la localización existentes para su modificación mediante estrategias basadas en eventos.
-
Modelar matemáticamente las plataformas requeridas en los filtros de fusión para la localización.
-
Desarrollar el algoritmo de fusión para la localización cooperativa eficiente en el uso del canal de comunicación.
-
Seleccionar los algoritmos de navegación para el movimiento de los robots dentro del grupo cooperativo.
-
Desarrollar e implementar un programa simulador para validar el algoritmo de fusión desarrollado.
-
Medir la mejora en el uso del canal de comunicación obtenida mediante el algoritmo desarrollado.
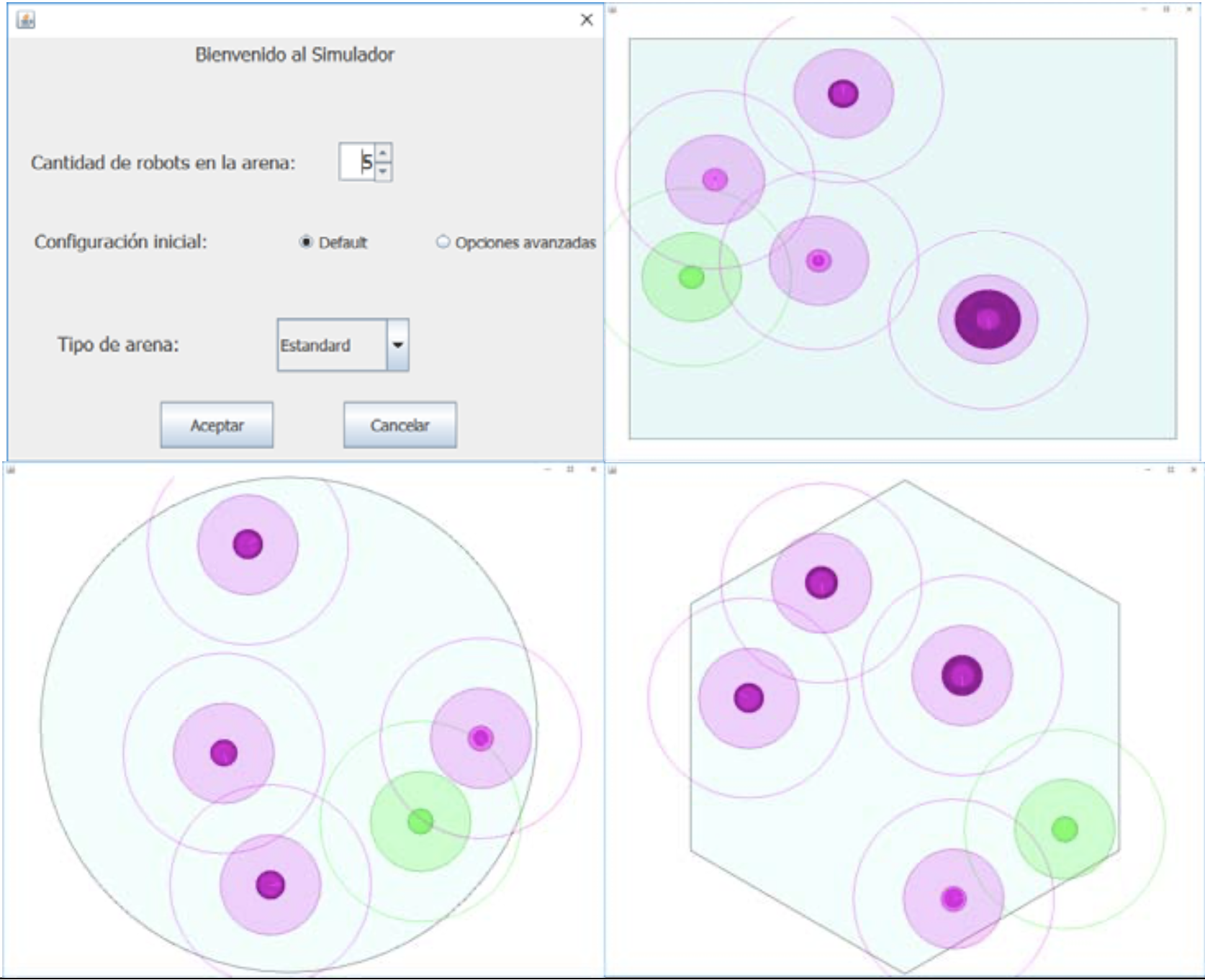
Resultados
Se cuenta con un simulador multirobot con interfaz gráfica que permite probar algoritmos de localización cooperativa para distintos grupos de robots en distintos escenarios. Este simulador permitirá continuar la investigación en el tema de robótica cooperativa, y podrá ser utilizado en los cursos de robótica de la Escuela de Ingeniería Eléctrica.