Sintonización de controladores industriales utilizando métodos de optimización multiobjetivo
Número: 322-B4-218
 Los procesos industriales se ven continuamente sometidos a perturbaciones indeseables que hacen que el sistema se salga de su punto de operación normal. Es por esta razón que existen instrumentos llamados controladores que manipulan algunas variables del proceso, de manera que se contrarreste el efecto de estas perturbaciones. Sin embargo, muchos de los controladores no están sintonizados de una manera adecuado, haciendo que el sistema sea ineficiente o incluso, propenso a fallos.
Los procesos industriales se ven continuamente sometidos a perturbaciones indeseables que hacen que el sistema se salga de su punto de operación normal. Es por esta razón que existen instrumentos llamados controladores que manipulan algunas variables del proceso, de manera que se contrarreste el efecto de estas perturbaciones. Sin embargo, muchos de los controladores no están sintonizados de una manera adecuado, haciendo que el sistema sea ineficiente o incluso, propenso a fallos.
Este proyecto propone un algoritmo de sintonización que considere diversas fuentes de perturbación al mismo tiempo, de manera que se pueda obtener los parámetros óptimos de un controlador industrial. Para ello será necesario definir un problema de optimización multiobjetivo que contemple todas los requerimientos, tanto desde el punto de vista de rendimiento como de robustez. Finalmente, el objetivo principal es crear una herramienta computacional para asistir en la sintonización de controladores PID de dos grados de libertad para plantas de segundo orden sobreamortiguada, que utilicen como base una optimización del tipo multiobjetivo de manera que se tomen en cuenta al mismo tiempo, al menos tres fuentes de perturbación además de la robustez.
Objetivos
Los objetivos de este proyecto son:
-
Diseñar, implementar y probar un programa para la optimización de los parámetros de un controlador PID de dos grados de libertad para al menos 3 funciones objetivo
-
Crear una base de datos con los parámetros óptimos de controladores PID de dos grados de libertad para plantas de segundo orden sobreamortiguadas
-
Obtener reglas de sintonización lo más sencillas posible, basadas en los datos obtenidos de la optimización
-
Diseñar, implementar y probar un software interactivo que permita seleccionar el mejor conjunto de parámetros del controlador para el sistema de control en estudio
A pesar de que existen ejemplos en la literatura en los que se ha intentado aplicar técnicas de optimización a los sistema de control, son muy pocas las que consideran varias fuentes de perturbación al mismo tiempo. De hecho, muchos de ellos tratan de de optimizar diferentes criterios de rendimiento, pero sólo considerando la respuesta ante una perturbación a la entrada del sistema o ante un cambio en la señal de referencia. Este proyecto tendrá un impacto importante en la comunidad de control, puesto que propondrá una generalización del problema clásico de compromiso servo-regulador de controladores PID. Además, se creará un software de visualización que podrá ser utilizado directamente por ingenieros practicantes que deban sintonizar controladores PID en la industria en la que trabajan.
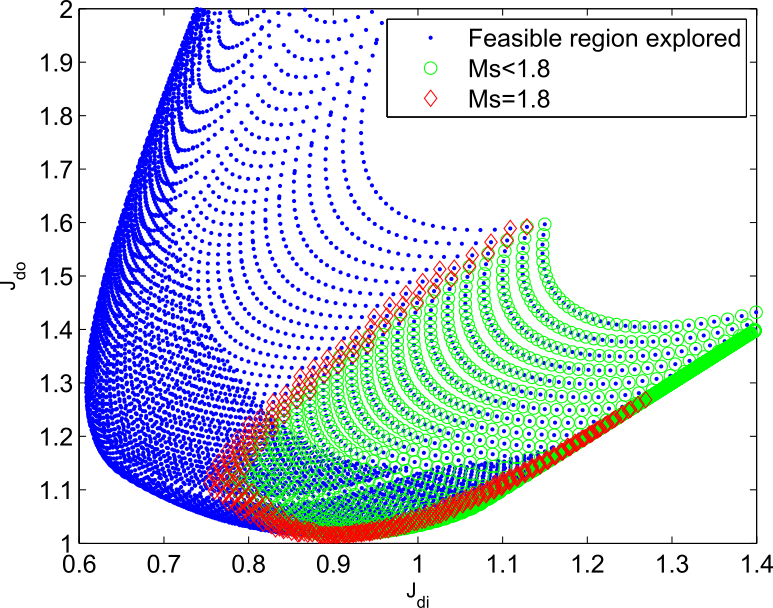
Resultados
Los resultados de las optimizaciones se encuentran disponibles aquí y pueden ser utilizados libremente.